Note
This tutorial was generated from an IPython notebook that can be downloaded here.
theano version: 1.0.4
pymc3 version: 3.7
exoplanet version: 0.2.0
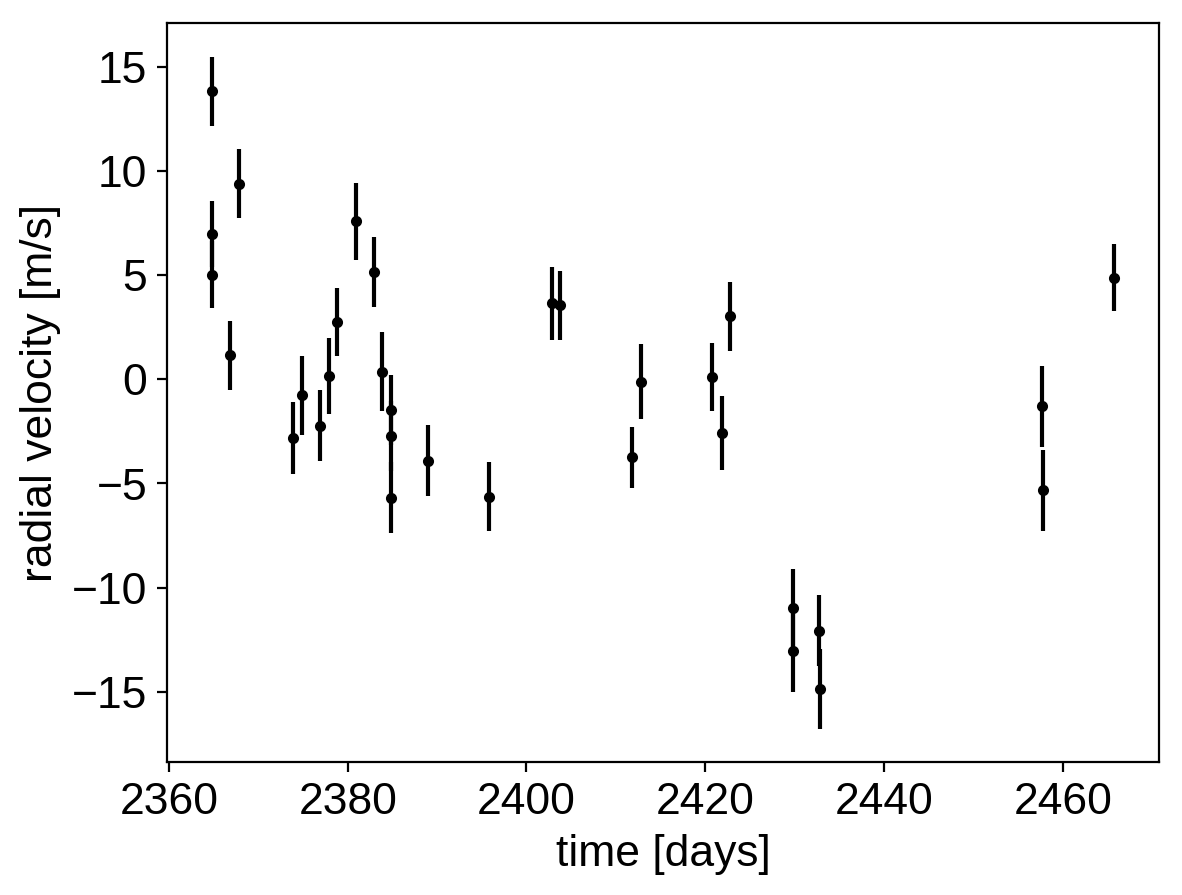
In this tutorial, we will demonstrate how to fit radial velocity observations of an exoplanetary system using exoplanet. We will follow the getting started tutorial from the exellent RadVel package where they fit for the parameters of the two planets in the K2-24 system.
First, let’s download the data from RadVel:
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
url = "https://raw.githubusercontent.com/California-Planet-Search/radvel/master/example_data/epic203771098.csv"
data = pd.read_csv(url, index_col=0)
x = np.array(data.t)
y = np.array(data.vel)
yerr = np.array(data.errvel)
plt.errorbar(x, y, yerr=yerr, fmt=".k")
plt.xlabel("time [days]")
plt.ylabel("radial velocity [m/s]");
Now, we know the periods and transit times for the planets from the K2
light curve, so let’s start by
using the exoplanet.estimate_semi_amplitude() function to
estimate the expected RV semi-amplitudes for the planets.
import exoplanet as xo
periods = [20.8851, 42.3633]
period_errs = [0.0003, 0.0006]
t0s = [2072.7948, 2082.6251]
t0_errs = [0.0007, 0.0004]
Ks = xo.estimate_semi_amplitude(periods, x, y, yerr, t0s=t0s)
print(Ks, "m/s")
[5.05069163 5.50983542] m/s
Now that we have the data and an estimate of the initial values for the parameters, let’s start defining the probabilistic model in PyMC3 (take a look at A quick intro to PyMC3 for exoplaneteers if you’re new to PyMC3). First, we’ll define our priors on the parameters:
import pymc3 as pm
import theano.tensor as tt
with pm.Model() as model:
# Gaussian priors based on transit data (from Petigura et al.)
t0 = pm.Normal("t0", mu=np.array(t0s), sd=np.array(t0_errs), shape=2)
P = pm.Bound(pm.Normal, lower=0)("P", mu=np.array(periods), sd=np.array(period_errs),
shape=2, testval=np.array(periods))
# Wide log-normal prior for semi-amplitude
logK = pm.Bound(pm.Normal, lower=0)("logK", mu=np.log(Ks), sd=10.0,
shape=2, testval=np.log(Ks))
# Eccentricity & argument of periasteron
ecc = xo.distributions.UnitUniform("ecc", shape=2, testval=np.array([0.1, 0.1]))
omega = xo.distributions.Angle("omega", shape=2)
# Jitter & a quadratic RV trend
logs = pm.Normal("logs", mu=np.log(np.median(yerr)), sd=5.0)
trend = pm.Normal("trend", mu=0, sd=10.0**-np.arange(3)[::-1], shape=3)
Now we’ll define the orbit model:
with model:
# Set up the orbit
orbit = xo.orbits.KeplerianOrbit(
period=P, t0=t0,
ecc=ecc, omega=omega)
# Set up the RV model and save it as a deterministic
# for plotting purposes later
vrad = orbit.get_radial_velocity(x, K=tt.exp(logK))
pm.Deterministic("vrad", vrad)
# Define the background model
A = np.vander(x - 0.5*(x.min() + x.max()), 3)
bkg = pm.Deterministic("bkg", tt.dot(A, trend))
# Sum over planets and add the background to get the full model
rv_model = pm.Deterministic("rv_model", tt.sum(vrad, axis=-1) + bkg)
For plotting purposes, it can be useful to also save the model on a fine grid in time.
t = np.linspace(x.min()-5, x.max()+5, 1000)
with model:
vrad_pred = orbit.get_radial_velocity(t, K=tt.exp(logK))
pm.Deterministic("vrad_pred", vrad_pred)
A_pred = np.vander(t - 0.5*(x.min() + x.max()), 3)
bkg_pred = pm.Deterministic("bkg_pred", tt.dot(A_pred, trend))
rv_model_pred = pm.Deterministic("rv_model_pred",
tt.sum(vrad_pred, axis=-1) + bkg_pred)
Now, we can plot the initial model:
plt.errorbar(x, y, yerr=yerr, fmt=".k")
with model:
plt.plot(t, xo.eval_in_model(vrad_pred), "--k", alpha=0.5)
plt.plot(t, xo.eval_in_model(bkg_pred), ":k", alpha=0.5)
plt.plot(t, xo.eval_in_model(rv_model_pred), label="model")
plt.legend(fontsize=10)
plt.xlim(t.min(), t.max())
plt.xlabel("time [days]")
plt.ylabel("radial velocity [m/s]")
plt.title("initial model");
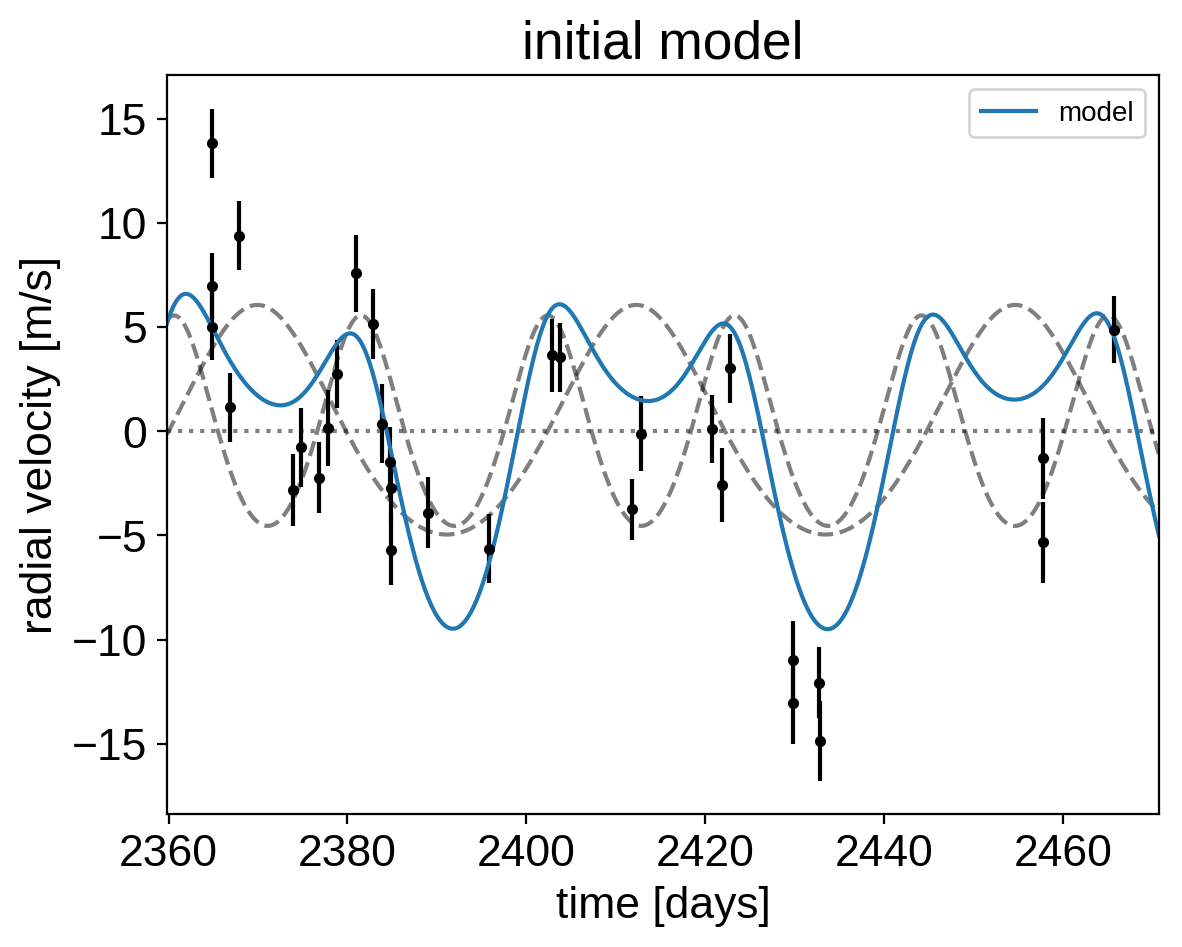
In this plot, the background is the dotted line, the individual planets are the dashed lines, and the full model is the blue line.
It doesn’t look amazing so let’s add in the likelihood and fit for the maximum a posterior parameters.
with model:
err = tt.sqrt(yerr**2 + tt.exp(2*logs))
pm.Normal("obs", mu=rv_model, sd=err, observed=y)
map_soln = xo.optimize(start=model.test_point, vars=[trend])
map_soln = xo.optimize(start=map_soln)
optimizing logp for variables: ['trend']
message: Optimization terminated successfully.
logp: -79.73266285618838 -> -64.8482026233154
optimizing logp for variables: ['trend', 'logs', 'omega_angle__', 'ecc_logodds__', 'logK_lowerbound__', 'P_lowerbound__', 't0']
message: Desired error not necessarily achieved due to precision loss.
logp: -64.8482026233154 -> -14.27676026238089
plt.errorbar(x, y, yerr=yerr, fmt=".k")
plt.plot(t, map_soln["vrad_pred"], "--k", alpha=0.5)
plt.plot(t, map_soln["bkg_pred"], ":k", alpha=0.5)
plt.plot(t, map_soln["rv_model_pred"], label="model")
plt.legend(fontsize=10)
plt.xlim(t.min(), t.max())
plt.xlabel("time [days]")
plt.ylabel("radial velocity [m/s]")
plt.title("MAP model");
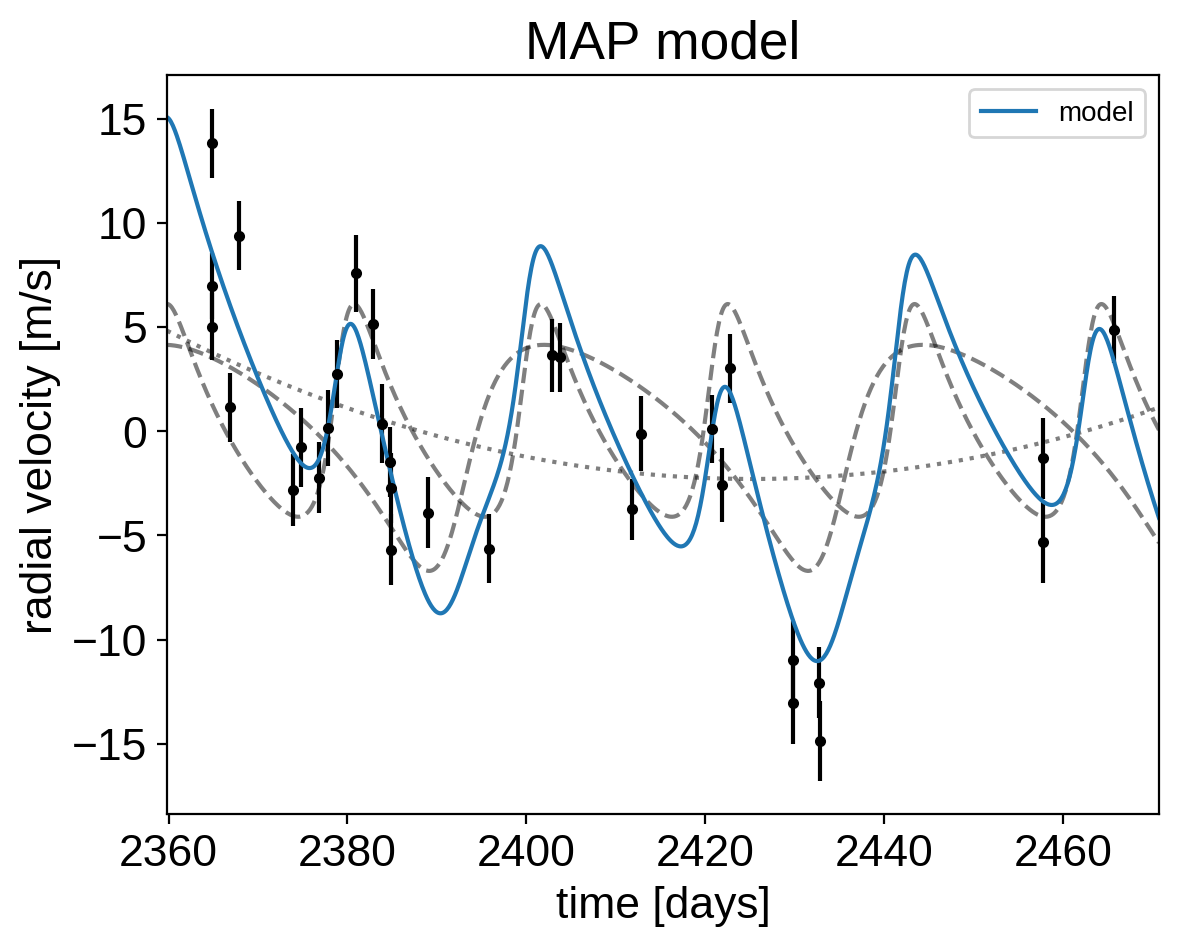
That looks better.
Now that we have our model set up and a good estimate of the initial
parameters, let’s start sampling. There are substantial covariances
between some of the parameters so we’ll use a
exoplanet.PyMC3Sampler to tune the sampler (see the
PyMC3 extras tutorial for more information).
np.random.seed(42)
sampler = xo.PyMC3Sampler(start=200, window=100, finish=300)
with model:
burnin = sampler.tune(tune=4000, start=model.test_point,
step_kwargs=dict(target_accept=0.95))
trace = sampler.sample(draws=4000)
Sampling 4 chains: 100%|██████████| 808/808 [00:10<00:00, 78.47draws/s] Sampling 4 chains: 100%|██████████| 408/408 [00:04<00:00, 90.78draws/s] Sampling 4 chains: 100%|██████████| 808/808 [00:10<00:00, 76.80draws/s] Sampling 4 chains: 100%|██████████| 1608/1608 [00:04<00:00, 349.38draws/s] Sampling 4 chains: 100%|██████████| 3208/3208 [00:07<00:00, 413.07draws/s] Sampling 4 chains: 100%|██████████| 9208/9208 [00:21<00:00, 422.30draws/s] Sampling 4 chains: 100%|██████████| 1208/1208 [00:03<00:00, 358.11draws/s] Multiprocess sampling (4 chains in 4 jobs) NUTS: [trend, logs, omega, ecc, logK, P, t0] Sampling 4 chains: 100%|██████████| 16000/16000 [00:35<00:00, 447.28draws/s] There was 1 divergence after tuning. Increase target_accept or reparameterize. There was 1 divergence after tuning. Increase target_accept or reparameterize. There were 3 divergences after tuning. Increase target_accept or reparameterize. There were 3 divergences after tuning. Increase target_accept or reparameterize. The number of effective samples is smaller than 25% for some parameters.
After sampling, it’s always a good idea to do some convergence checks. First, let’s check the number of effective samples and the Gelman-Rubin statistic for our parameters of interest:
pm.summary(trace, varnames=["trend", "logs", "omega", "ecc", "t0", "logK", "P"])
| mean | sd | mc_error | hpd_2.5 | hpd_97.5 | n_eff | Rhat | |
|---|---|---|---|---|---|---|---|
| trend__0 | 0.000943 | 0.000766 | 0.000009 | -0.000655 | 0.002377 | 9084.171582 | 1.000316 |
| trend__1 | -0.038787 | 0.022553 | 0.000215 | -0.081289 | 0.007382 | 12590.589975 | 1.000017 |
| trend__2 | -1.966654 | 0.792923 | 0.008968 | -3.478545 | -0.386796 | 8979.086152 | 1.000088 |
| logs | 1.037403 | 0.225465 | 0.002664 | 0.586289 | 1.472128 | 7744.612868 | 1.000275 |
| omega__0 | -0.301599 | 0.763510 | 0.012435 | -1.455029 | 1.399849 | 3698.042885 | 1.000084 |
| omega__1 | -0.614803 | 2.127830 | 0.030955 | -3.004359 | 3.069314 | 5019.010436 | 1.000444 |
| ecc__0 | 0.236652 | 0.114062 | 0.001625 | 0.003214 | 0.432213 | 5482.918193 | 1.000122 |
| ecc__1 | 0.196759 | 0.145068 | 0.002072 | 0.000030 | 0.479316 | 4963.360263 | 1.000431 |
| t0__0 | 2072.794805 | 0.000710 | 0.000006 | 2072.793405 | 2072.796163 | 14939.725878 | 1.000032 |
| t0__1 | 2082.625100 | 0.000397 | 0.000003 | 2082.624334 | 2082.625876 | 14644.485012 | 0.999973 |
| logK__0 | 1.560495 | 0.239113 | 0.003083 | 1.060533 | 1.990766 | 6186.170246 | 1.000290 |
| logK__1 | 1.570386 | 0.226925 | 0.002382 | 1.092842 | 2.002090 | 7248.929002 | 1.000063 |
| P__0 | 20.885101 | 0.000300 | 0.000003 | 20.884511 | 20.885680 | 15303.944535 | 0.999970 |
| P__1 | 42.363295 | 0.000612 | 0.000005 | 42.362045 | 42.364432 | 14412.136580 | 0.999994 |
It looks like everything is pretty much converged here. Not bad for 14 parameters and about a minute of runtime…
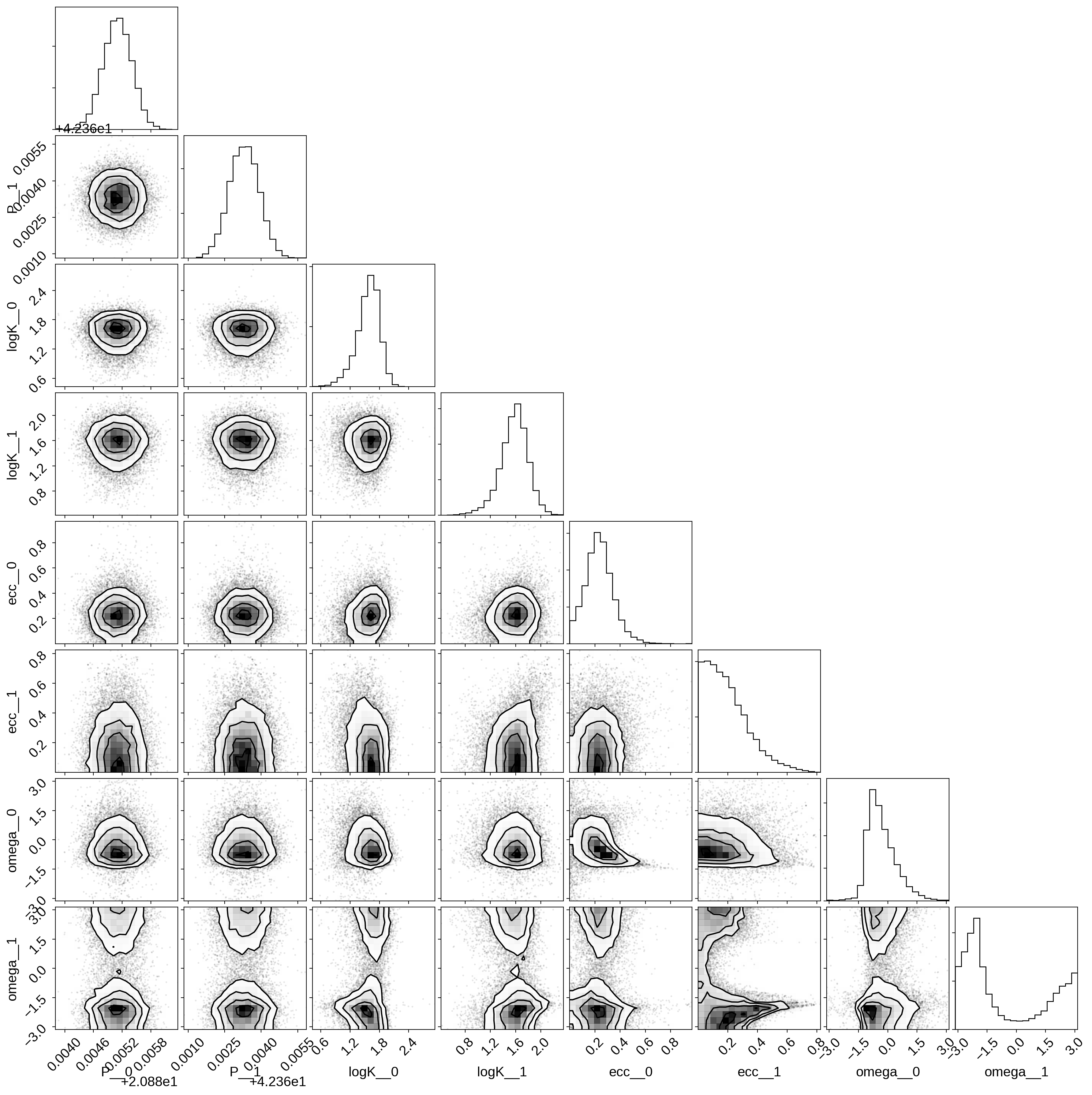
Then we can make a corner plot of any combination of the parameters. For example, let’s look at period, semi-amplitude, and eccentricity:
import corner
samples = pm.trace_to_dataframe(trace, varnames=["P", "logK", "ecc", "omega"])
corner.corner(samples);
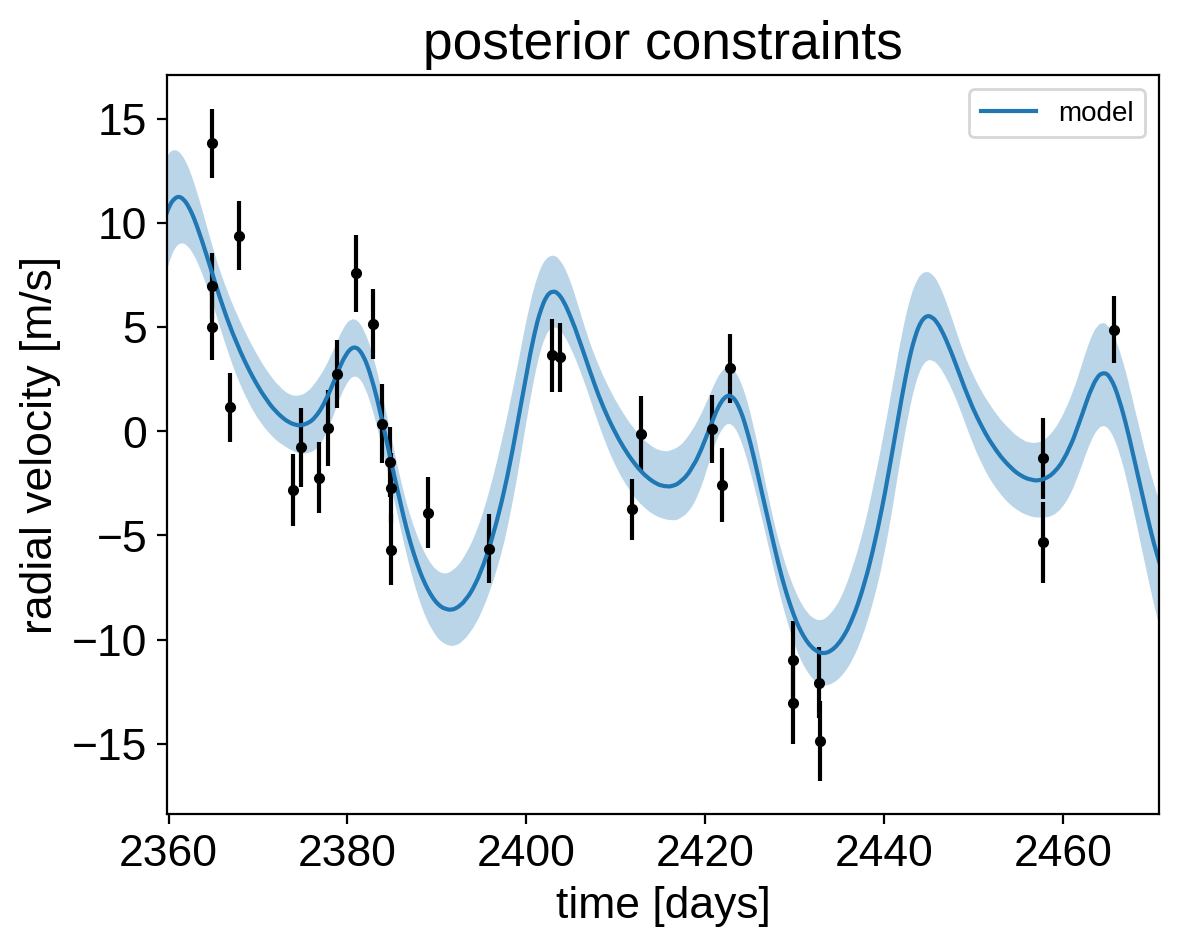
Finally, let’s plot the plosterior constraints on the RV model and compare those to the data:
plt.errorbar(x, y, yerr=yerr, fmt=".k")
# Compute the posterior predictions for the RV model
pred = np.percentile(trace["rv_model_pred"], [16, 50, 84], axis=0)
plt.plot(t, pred[1], color="C0", label="model")
art = plt.fill_between(t, pred[0], pred[2], color="C0", alpha=0.3)
art.set_edgecolor("none")
plt.legend(fontsize=10)
plt.xlim(t.min(), t.max())
plt.xlabel("time [days]")
plt.ylabel("radial velocity [m/s]")
plt.title("posterior constraints");
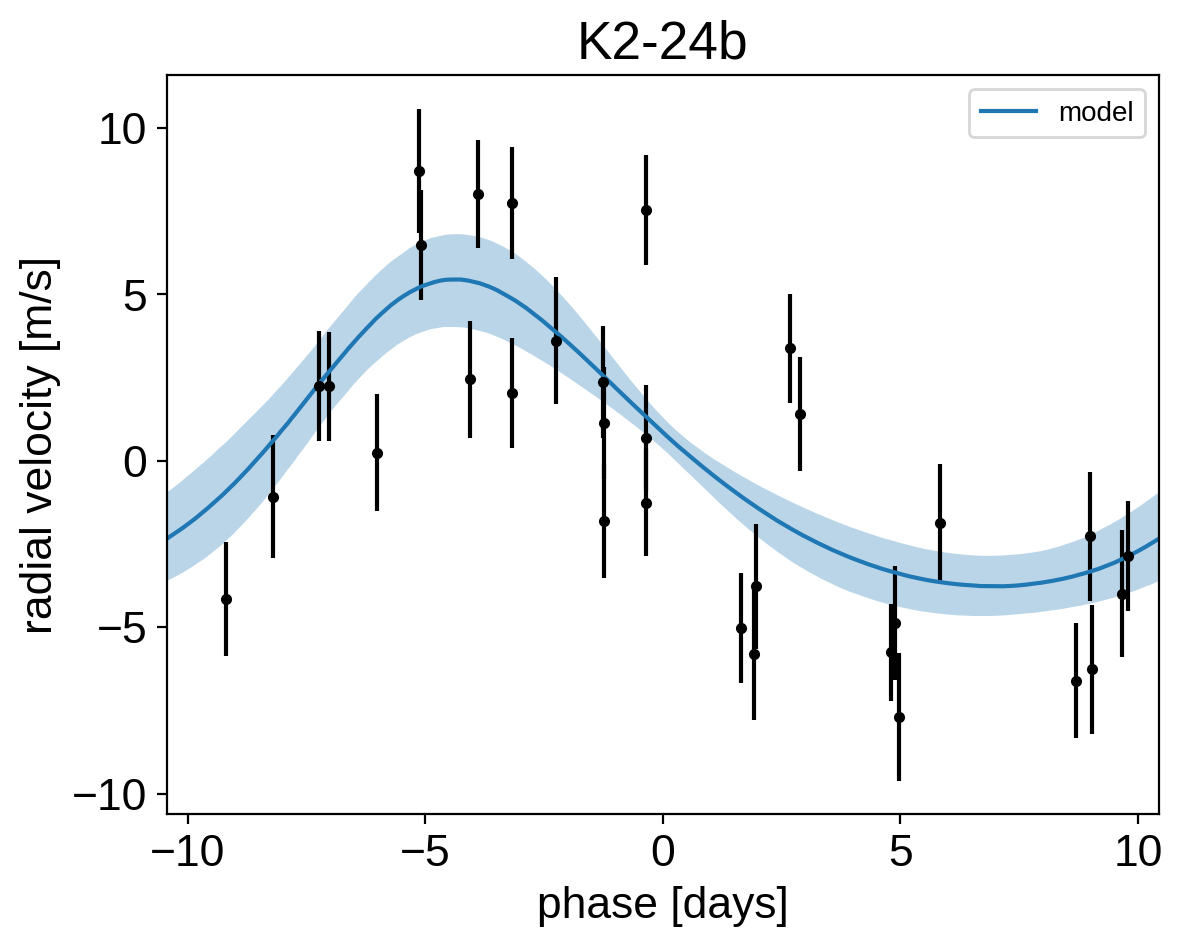
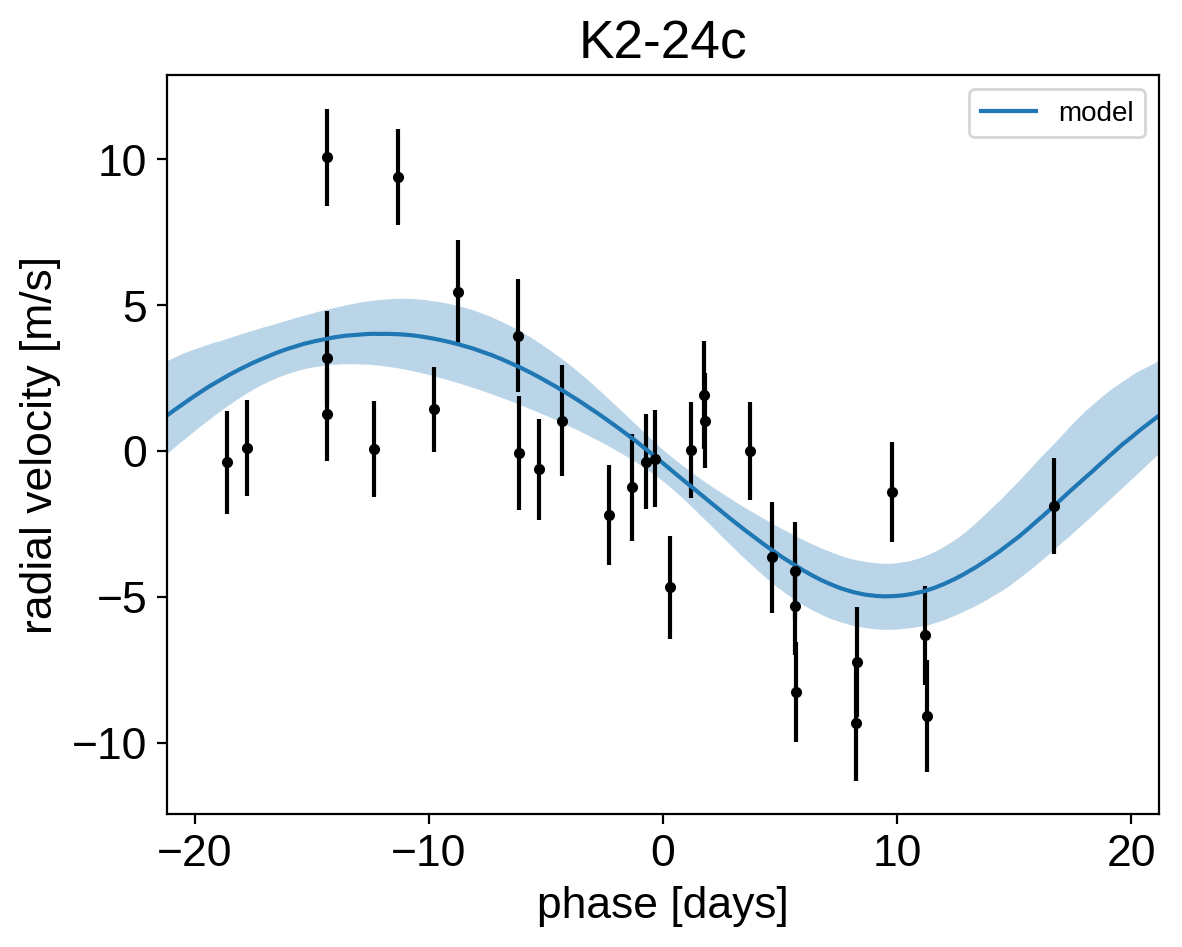
It might be also be interesting to look at the phased plots for this system. Here we’ll fold the dataset on the median of posterior period and then overplot the posterior constraint on the folded model orbits.
for n, letter in enumerate("bc"):
plt.figure()
# Get the posterior median orbital parameters
p = np.median(trace["P"][:, n])
t0 = np.median(trace["t0"][:, n])
# Compute the median of posterior estimate of the background RV
# and the contribution from the other planet. Then we can remove
# this from the data to plot just the planet we care about.
other = np.median(trace["vrad"][:, :, (n + 1) % 2], axis=0)
other += np.median(trace["bkg"], axis=0)
# Plot the folded data
x_fold = (x - t0 + 0.5*p) % p - 0.5*p
plt.errorbar(x_fold, y - other, yerr=yerr, fmt=".k")
# Compute the posterior prediction for the folded RV model for this
# planet
t_fold = (t - t0 + 0.5*p) % p - 0.5*p
inds = np.argsort(t_fold)
pred = np.percentile(trace["vrad_pred"][:, inds, n], [16, 50, 84], axis=0)
plt.plot(t_fold[inds], pred[1], color="C0", label="model")
art = plt.fill_between(t_fold[inds], pred[0], pred[2], color="C0", alpha=0.3)
art.set_edgecolor("none")
plt.legend(fontsize=10)
plt.xlim(-0.5*p, 0.5*p)
plt.xlabel("phase [days]")
plt.ylabel("radial velocity [m/s]")
plt.title("K2-24{0}".format(letter));
As described in the Citing exoplanet & its dependencies tutorial, we can use
exoplanet.citations.get_citations_for_model() to construct an
acknowledgement and BibTeX listing that includes the relevant citations
for this model.
with model:
txt, bib = xo.citations.get_citations_for_model()
print(txt)
This research made use of textsf{exoplanet} citep{exoplanet} and its
dependencies citep{exoplanet:astropy13, exoplanet:astropy18,
exoplanet:exoplanet, exoplanet:pymc3, exoplanet:theano}.
print("\n".join(bib.splitlines()[:10]) + "\n...")
@misc{exoplanet:exoplanet,
author = {Dan Foreman-Mackey and
Geert Barentsen and
Tom Barclay},
title = {dfm/exoplanet: exoplanet v0.1.6},
month = apr,
year = 2019,
doi = {10.5281/zenodo.2651251},
url = {https://doi.org/10.5281/zenodo.2651251}
...